NVIDIA has added tools in its Isaac developer toolbox to provide greater support for the Robot Operating System (ROS).
Announced in conjunction with ROS World 2021, the deepened support will deliver performant perception technologies to the ROS developer community. It will help to accelerate product development, improve product performance, and simplify the incorporation of cutting-edge computer vision and AI/ML functionality into ROS-based robotic applications.
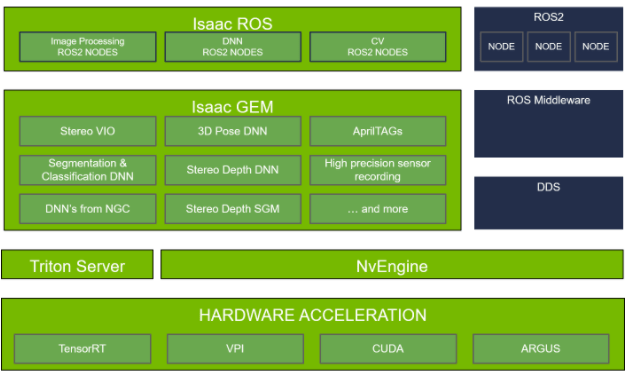
Perceiving and understanding the surrounding world is vital for robots. As the autonomous machines move around their environments, they must keep track of where they are. Visual odometry solves this problem by estimating where a camera is relative to its starting position. The Isaac ROS GEM for stereo visual odometry provides this powerful functionality to ROS developers. In addition to being highly accurate for a real-time stereo camera visual odometry solution, this GPU-accelerated package runs extremely fast — running SLAM on HD resolution (1280×720) in real-time (>60fps) on an NVIDIA Jetson AGX Xavier.
Developers can use NVIDIA’s inference models available on NGC or their own DNN with DNN Inference GEM, a set of ROS2 packages. Further tuning of pre-trained models or optimisations of models can be done with the NVIDIA TAO Toolkit. After optimisation, NVIDIA’s TensorRT or Triton inference server can deploy these packages.
Available in November 2021, Isaac Sim will come with improvements in the user interface, performance and useful building blocks for faster build and better simulations. The new synthetic data workflow provided is designed to build production datasets that address the safety and quality concerns of autonomous robots.
